资讯
- 资讯
- 安检商家



毫米波雷达有助自动驾驶汽车成为可能
2018-08-06 14:51:37 来源:
TAGS关键字:安检安防
[摘要] 将来某一天,自动驾驶车辆将可能比现在驾驶员驾驶的机动车辆更加安全。但在驾驶员开始放开方向盘之前,一些电子功能部件必须成为商用车辆的标准配置,包括毫米波雷达系统,摄像头
将来某一天,自动驾驶车辆将可能比现在驾驶员驾驶的机动车辆更加安全。但在驾驶员开始放开方向盘之前,一些电子功能部件必须成为商用车辆的标准配置,包括毫米波雷达系统,摄像头和(或)激光雷达。与公路相比,雷达似乎与战场更容易联系在一起。但其正稳步成为一种非常可靠的传感器技术,作为现代汽车中先进驾驶辅助系统(ADAS)技术的一部分为现代商用车辆提供电子安全功能。毫米波雷达系统是汽车工业中的一项成熟技术,作为第一个主动安全功能的制动辅助系统,自1996年以来一直由梅赛德斯 - 奔驰公司使用,现在通常用于现代ADAS系统中的盲点检测和防碰撞保护。
毫米波雷达有助于自动驾驶汽车成为可能,但它们需要多个要素相结合,包括能为频率在77 GHz以上的电子设备和电路提供稳定性能的电路材料。例如,在ADAS应用中,电路材料要求能够支持在24,77(或79)GHz的微波和毫米波信号的传输线设计,实现损耗最小,同时在宽工作温度范围内提供一致的可重复性能。幸运的是,罗杰斯公司可提供这种电路材料,其具有从微波到高频毫米波频段的ADAS应用所需的一致性能。
作为车辆ADAS系统电子感知保护的一部分,车载雷达系统会与其他一些技术一起使用(图1)。雷达系统以无线电波的形式发送电磁(EM)信号,并接收来自目标(如另一辆车)的无线电波的反射信号,其通常为多个目标。雷达系统可以从这些接收到的反射信号中提取相应目标的信息,包括它的位置,距离,相对速度和雷达截面(RCS)。范围(R)可以基于光速(c)和信号所需的往返时间(τ) 确定,往返时间即无线电波从雷达能量源(雷达发射机)到目标,然后返回到雷达能量源的时间。在车载雷达系统中,雷达信号的发生和接收就是PCB天线。R的值可以通过简单的数学公式求得,即光速与从雷达信号源到目标并返回到雷达源的往返传输时间的乘积除以2:R =cτ/ 2 。
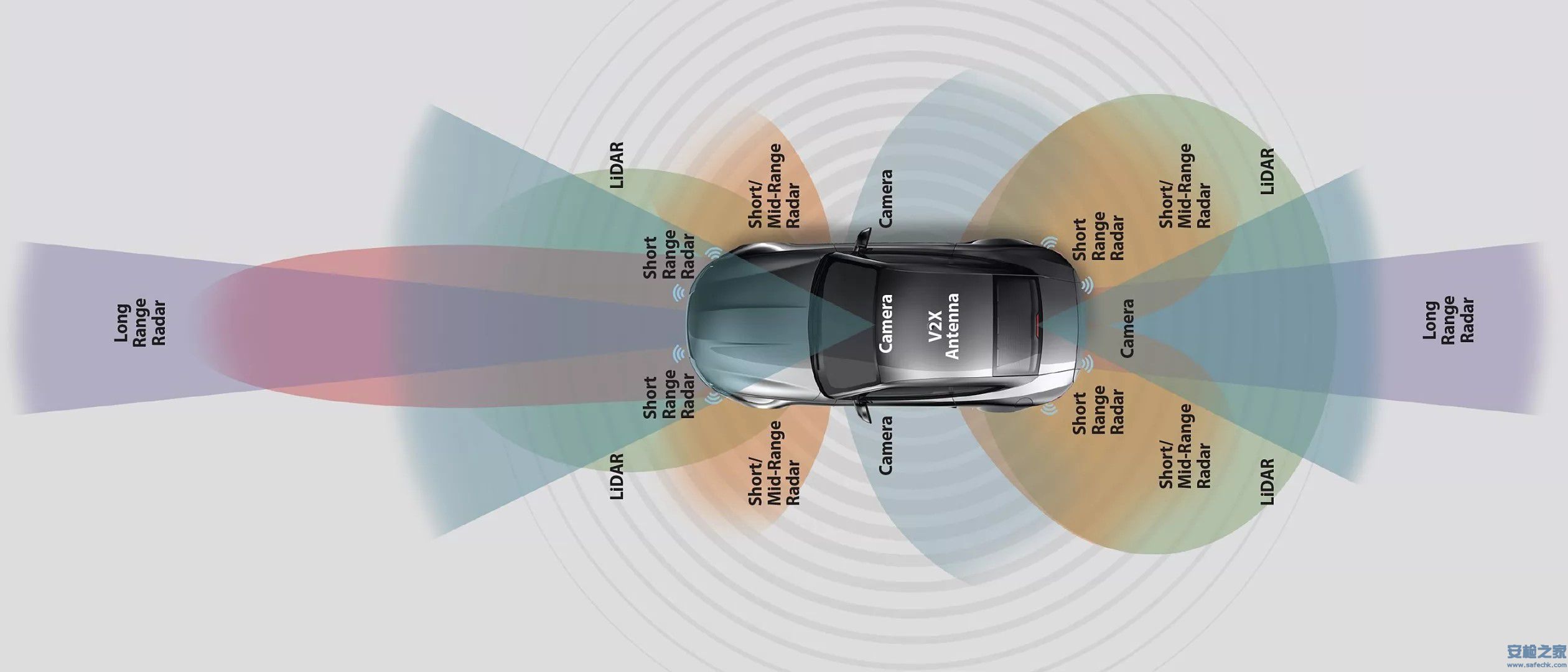
图1:作为ADAS主动安全的一部分,车辆配备了各种传感器,包括摄像机,激光雷达和雷达系统。
当多个雷达目标距离较近时,例如在道路拥堵时的两辆车,就需要精确的雷达距离分辨率来区分被探测到的物体。可以利用较短的雷达脉冲探测目标,尽管较短的脉冲或任何类型的信号都会只有较少的能量从目标反射回雷达接收器。通过使用脉冲压缩可以将更多的能量添加到更短的脉冲中,其中相位或频率调制可以提高其功率水平。为此,基于调频连续波(FMCW)信号(也称为“线性调频”信号)的雷达通常用于车辆雷达系统。
对目标速度的估计可以通过多普勒效应来实现,多普勒效应是指根据目标相对于雷达发射机/接收机的运动而从雷达获得的目标反射的信号频率的变化。多普勒频移与波长成反比:根据雷达目标是接近还是远离雷达源,分别为取正或负值。
FMCW或线性调频雷达系统可以测量多个目标的速度,距离和角度。 虽然工作于24GHz下的窄带(NB)和超宽带(UWB)FMCW雷达得到了广泛的应用,但该频段的应用正在逐渐减少。在车载安全系统中越来越多地使用1GHz带宽的窄带77-GHz雷达系统。 此外,汽车行业正在研究UWB 79-GHz雷达,以备未来的应用。 CW雷达相对简单,可以检测目标的速度,但不能检测目标的距离。脉冲连续波雷达还可以使用多个多普勒频率估计距离。 脉冲持续时间和脉冲重复频率(PRF)是设计性能可靠的脉冲连续波雷达系统的两个关键参数。
由于脉冲压缩,FMCW雷达的距离分辨率与FMCW信号的带宽成反比,而与脉冲宽度无关。 短程FMCW雷达使用UWB波形可以高分辨率的测量小距离。 多普勒分辨率是脉冲宽度和用于估计的脉冲数量的函数。任何雷达系统中的杂波都是由感兴趣目标以外的物体反射的雷达信号产生的噪声。在任何雷达系统中,与周围的其他物体相比,雷达必须从众多被雷达信号照射的物体中识别出有效目标。
车载电子安全系统利用其他物理参数(如视觉和光线)向车辆的ADAS域控制器提供可用数据,域控制器是执行传感器信息融合以帮助安全引导车辆的信息处理中心。前置摄像头用于车道偏离警告和物体检测的成像,而后置摄像头可以根据需要提供反向和附加成像。光检测和测距(LiDAR,激光雷达)系统将红外(IR)光的脉冲传输到目标(例如另一辆车或停车场内的墙壁),并检测返回到源的IR脉冲,基于光的传播速度来计算源和目标之间的距离。利用关于IR脉冲的长度和波长以及从反射并返回到车辆中的IR检测器/接收器所需的时间等细节参量,可以计算IR照射的物体的位置和相对运动。不幸的是,车辆激光雷达系统的性能和有效性极易会受到环境条件的严重影响,如雪、雨、雾等。

推荐产品
 IWILDT™ AN-48002800L物流园大型货车X光安检系统
IWILDT™ AN-48002800L物流园大型货车X光安检系统价格:¥0.00
 IWILDT™ AN-9000CTL静态立体断层扫描X光安检机
IWILDT™ AN-9000CTL静态立体断层扫描X光安检机价格:¥0.00





CopyRight © 2005-2019安检之家安保网 Inc. All Rights Reserved