资讯
- 资讯
- 安检商家



IWILDT双DSP的防爆机器人控制器设备的设计
2020-07-04 09:27:11 来源:
TAGS关键字:
[摘要]随着现代科学技术的发展,机器人技术也不断提高,机器人的应用领域不断扩展,人们希望机器人能够灵活地适应各种工作环境,完成更多复杂任务。移动机器人具有优越的机动性和灵活性,在
1.4 电源转换电路和电源监控电路
控制器电路板采用 +5V 供电,由于 LF2406 芯片是+3.3V供电,所以需要电源转换(+5V转+3.3V)电路。本系统采用 T I 公司生产的电源转芯片TPS77533PWP,其供电功率为 2.9W。该电源转换芯片为主从两个 LF2406 和串口扩展芯片 SP2539 提供电压,经过计算,满足该系统的+3.3V供电需求。TPS77533PWP 在控制系统改变负载时仍能保持正常工作,并且当输出电压降至正常值的 92%~98% 时,可以输出复位信号给LF2406 进行复位。如图 2 所示。
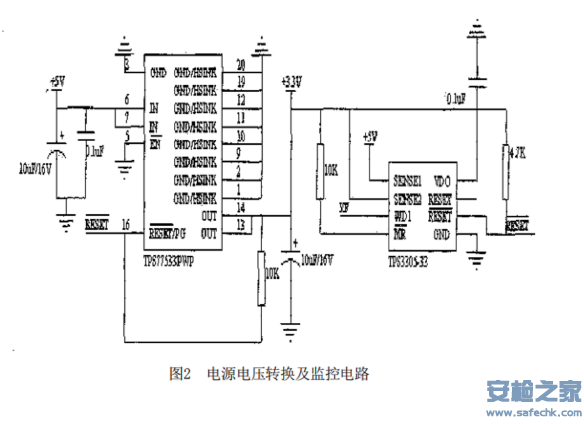
DSP 芯片对工作电压的要求非常高,一般都要求电压偏差不超过 5%,即电压偏差不能
超过0.165V,否则,一旦工作电压偏差超出这个范围,长时间工作容易缩短寿命甚至于烧毁。因此,在电路中需要通过电压监控电路来实现对电压的实时监控,以期电源能够为芯片提供合格而稳定的电压,并保证整机的可靠运转。本系统采用TI公司生产的TPS3305-33电压监控芯片,可同时监控两路电压 +3.3V 和 +5V。
2 控制器工作原理
该防爆机器人的控制器以 LF2406 数字信号处理器为 CPU 核心,采用主从双处理器分工控制。机器人通过 GSM 无线通信网络接受任务信息,在主DSP 中进行任务规划;利用 GPS、电子罗盘等信息进行全局定位;通过超声波阵列驱动卡获得障碍信息,进行局部路径规划;在得到规划好的路径后,通过串行通信接口SPI向从DSP传输运动控制命令,从DSP 的 PWM 通道和 I/O 口输出脉冲和方向来驱动电机运转。如图 3 所示。该防爆机器人的执行机构由8个直流伺服电机驱动,分别为:车体左轮电机、车体右轮电机、避障手臂电机、操作臂底座电机、操作臂肩关节电机、操作臂肘关节电机、操作臂腕关节电机和手指开合电机。8 个电机均采用步进模式控制(stepper motor mode),因此控制系统须输出各个电机相应的脉冲和方向信号。LF2406有4个定时器:Time1、Time2、Time3、Time4,每个定时器包括 16 位周期寄存器、16 位比较寄存器、16 位计数器和16位控制寄存器。Time1的周期寄存器定义了 PWM1/2、3/4、5/6T1PWM 的脉冲周期,Time1的比较寄存器定义了 PWM1/2、3/4、5/6、T1PWM的脉冲宽度;Time3 的周期寄存器定义了 PWM7/8、9/10、11/12、T3PWM 的脉冲周期,Time3的比较寄存器定义了 PWM7/8、9/10、11/12、T3PWM的脉冲宽度;Time2 的周期寄存器定义了 T2PWM 的脉冲周期,Time2 的比较寄存器定义了 T2PWM 的脉冲宽度;Time4 的周期寄存器定义了T4PWM 的脉冲周期,Time4 的比较寄存器定义了 T4PWM 的脉冲宽度。由于所有电机均是步进模式控制,所以脉冲比均为 50%。该防爆机器人的车体左右轮电机的脉冲分别由 T2PWM 和 T4PWM 输出,避障手臂电机和手指开合电机的脉冲分别由 PWM7 和 PWM9 输出,操作臂各关节电机的脉冲分别由 PWM1 、PWM3 、PWM5 和 T1PWM 输出。改变写入周期寄存器的值,便可改变脉冲频率,从而方便的实现电机的加减速控制。从 DSP 的通用 I/O 口输出的高低电平可控制各电机的转动方向。
3 主从处理器通信
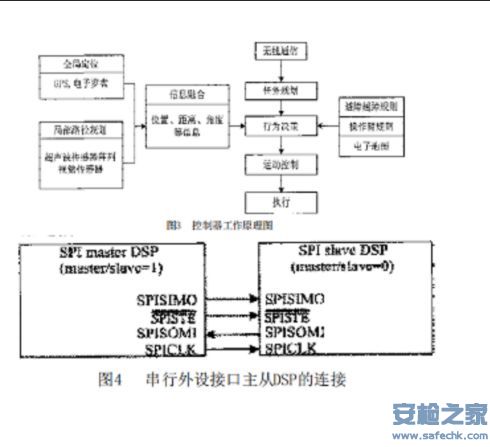
该防爆机器人控制器采用主从 DSP 处理器控制,主从DSP通过串口外设接口(SPI)通信。如图4 所示。SPI是一个高速、同步串行I/O口,它允许长度可编程的串行位流(1~16位)以可编程的位传输速度移入或移出器件。SPI 支持主从操作多处理器通信。
主从 DSP 之间的 SPI串行通信,硬件连接只需4根引脚线就可以实现数据传送,SPISOMI(从动输出 / 主动输入引脚)、SPISIMO(从动输入 / 主动输出引脚)、/SPISTE(从动发送使能引脚)、SPICLK(串行时钟引脚)。SPI实际上是一种串行总线标准,与 SCI串行异步通信有相似的地方也有不同之处。相同之处在于它们都是串行的信息交换,不同的是 SCI是一种异步方式,两台设备有各自的串行通信时钟,在相同的波特率和数据格式下达到同步,而 SPI是一种真正的同步方式,两台设备在同一个时钟下工作,它的传输速率远远高于SCI。
主 DSP 将时钟信号传送到从 DSP 的 SPICLK 管脚上,这就保证了两个 DSP真正在同一个时钟下工作,因此它的串行数据交换不需要增加起始位、停止位等用于同步的格式位。/SPISTE引脚作为SPI从DSP的片选引脚,在接收主 DSP的数据前把/SPISTE引脚置低,接受完数据后引脚置高。主 DSP通过输出 SPICLK 信号来启动数据传送,直接将要传送的信息(1~16 位的可编程串行位流)写入到主 DSP的 SPI 发送数据寄存器 SPITXBUF,然后在同步时钟 SPICLK 的节拍下把SPITXBUF 的内容一位一位地从引脚 SPISOMI 移到从 DSP 的移位寄存器SPIDAT,当 SPIDAT 的内容移位完毕,将置一个中断标志 SPI INT FLAG,通知主 DSP 这个信息块已发送完毕。对于从DSP,同样在同步时钟 SPICLK的节拍下将出现在引脚 SPISIMO上的数据一位一位地移到从DSP 的移位寄存器SPIDAT,当一个完整的信息块接收完成后,将置一个中断标志,通知从DSP这个信息块已接受完毕。

推荐产品
 IWILDT™ AN-48002800L物流园大型货车X光安检系统
IWILDT™ AN-48002800L物流园大型货车X光安检系统价格:¥0.00
 IWILDT™ AN-9000CTL静态立体断层扫描X光安检机
IWILDT™ AN-9000CTL静态立体断层扫描X光安检机价格:¥0.00





CopyRight © 2005-2019安检之家安保网 Inc. All Rights Reserved