资讯
- 资讯
- 安检商家



工业4.0之利器:复合机器人
2019-11-19 09:07:55 来源:艾崴安检
TAGS关键字:艾崴安检
[摘要]复合机器人研究背景我们国家连续五年成为全球最大机器人的应用市场,目前举国上下都在推动机器人产业。但是这个产业产值并不是想象这么大,甚至不如自行车的产值,不如大众汽车的

最早RGB-D是微软推出的,不但有视觉(RGB)的信息,还有深度的信息。这是我们用RGB-D传感器把实验室的环境建立出来了。
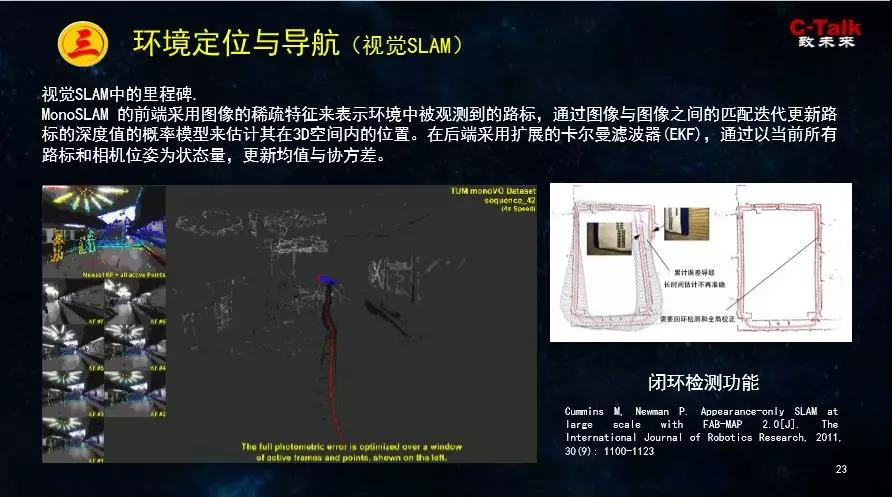
单目相机进行视觉里程时会产生累计误差,但这误差可以通过闭环来解决。

ORB-SLAM推出解决了传统视觉SLAM的缺点,在技术上完全可以代替激光SLAM,为视觉SLAM使用化也起了非常大的作用。

实验室利用ORB-SLAM算法开发基于全景的相机SLAM,有两个鱼眼镜头构成的相机,这种相机网上都可以买到,价格非常便宜,2000多元钱一个。用360度球形全方位视角信息来定位,在室内环境中物体位置发生变化,对定位不会感到影响。
但是在室外情况,有很多情况天空没有参照物的特征信息,为此我们就开发了基于多相机的视觉定位系统,根据双目相机可以得到距离信息原理,我们开发了算法,不但能计算环境的点云位置信息,还可以得到尺度。通过这样系统可以在室外马路上进行定位与导航。
但是我们知道,无论是激光也好,视觉也好,有一个共同的缺陷。遇到玻璃物体的时候,就无法定位,测量信号穿过玻璃没有反射。在环境非常黑暗的情况下,也无法定位。这时候就可用超声机械波信号进行SLAM。
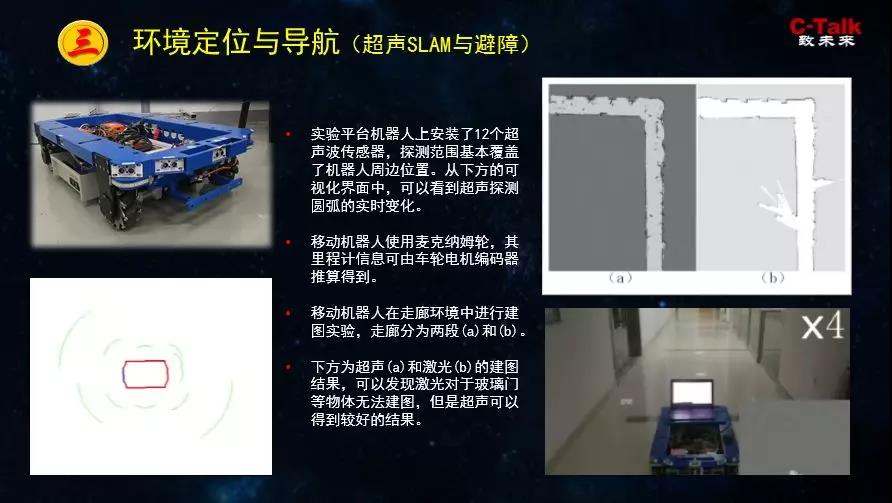
我们实验室也开发了一种超声SLAM算法。我们知道在汽车上超声避障用得非常多,同样通过超声也可以进行SLAM。右上角图(a)是超声建立的地图,图(b)是激光建立的地图,遇到玻璃会产生一些误区。
物体时变与移动抓取规划
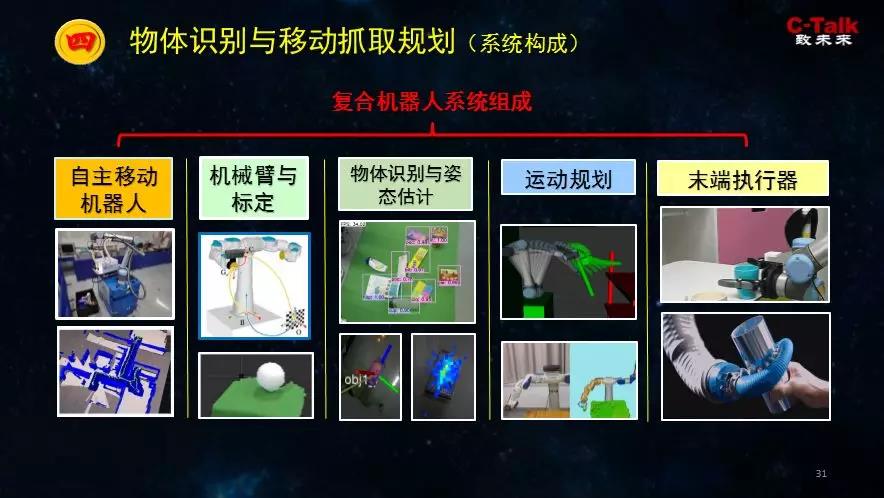
硬件上在移动机器人加上机械臂,软件有物体的识别和运动规划,就可以构成一个复合机器人的架构。
有了复合机器人以后,首先要教它干什么,第一步,需要它去抓的东西。操作流程,通过对物体3D的扫描、学习,使它产生记忆。其中也运用到了现在用得非常多的深度学习,从各种角度上给它多看(学习),就像见多识广。这样只要看到物体的一个角,就知道这个对象位置。在空间上,通过匹配,知道物体的位置,识别姿态。这样的话,就可以通过识别姿态后,我们就知道控制机器人往哪方面去抓。告诉我们机器人,你要跑到哪儿去,怎么抓,通过规划和策略,它可以产生移动动作。
还有一种案例是在一个筐里面有很多元器件,怎么去抓,基于激光感知是通常的方法。我们采用了单目相机,单目相机没办法感知这些尺度信息,我们提出方法和算法,也能计算出这些物体的位置和精度。把这样的东西跟机器人结合,就可以通过运动学产生运动轨迹规划。
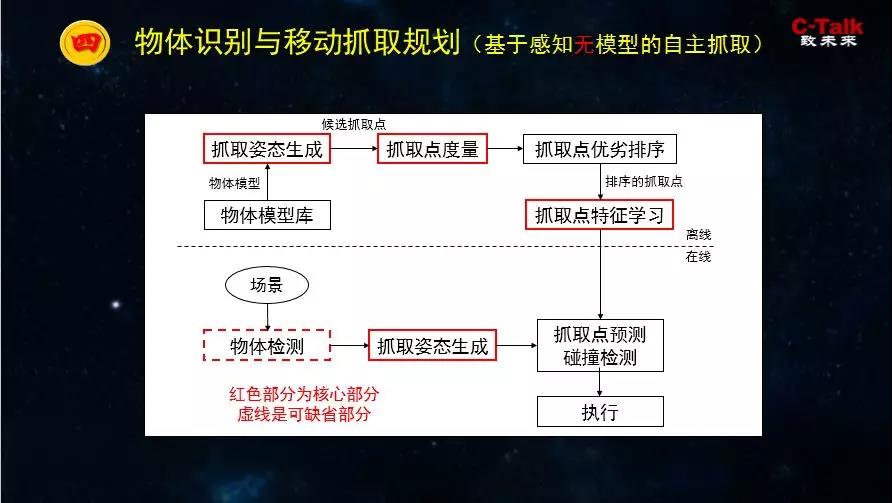
很多情况下,物体模型是不知道的,比如说我们要打扫卫生,捡垃圾,机器人针对无模型的自动抓取,根据特征点,判断能抓起来的都抓。
刚才解决了移动抓取问题,又经过了有模型和无模型的识别,把这些技术集成在一台设备上,有移动台,上面有一个机械臂。在无人仓库中硬件开始使用机器人搬运货物,但最后把货物捡出来还是需要人,这也是一个行业痛点。
京东为此搞了一个挑战赛,我们梯队就报名参加了,从大中华区300多支队伍初赛胜出,作为十支队之一到天津参加自动抓取的挑战赛决赛。我们这支队伍初赛、预赛得分点数应该都是最高的。
比赛中,首先是在工作环境中找到货架,货架安放的物品是随机的。品种有一些是事先告知,有一些是未知。裁判发布启动命令的时候,告知抓取品种和数量,机器人启动后人就不能干涉,全靠它自主把这个东西抓起来。累计得分点数我们的点数最高,最后进入决赛,冠亚军表演赛。

推荐产品
 IWILDT™ AN-48002800L物流园大型货车X光安检系统
IWILDT™ AN-48002800L物流园大型货车X光安检系统价格:¥0.00
 IWILDT™ AN-9000CTL静态立体断层扫描X光安检机
IWILDT™ AN-9000CTL静态立体断层扫描X光安检机价格:¥0.00





CopyRight © 2005-2019安检之家安保网 Inc. All Rights Reserved