资讯
- 资讯
- 安检商家



IWILDT排爆机器人双目立体视觉系统设计
2020-06-08 09:50:02 来源:
TAGS关键字:
[摘要]获取空间三维场景的距离信息是计算机视觉研究中最 基础的内容, 而立体视觉是计算机视觉中测距方法中最重要的距离感知技术, 它直接模拟人类视觉处理景物的方式, 可以在多种
2 系统集成
排爆机器人双目立体视觉系统的主要目标是利用本体上的一对摄像机 L1、L2 获取物体不同角度的两副图像,对两副图像进行处理,获取目标物的三维坐标。
系统在物理上可分为:左、右摄像枪,无线图像发送接收器, PCI总线图像采集卡,计算主机,如图3所示。
本视觉系统的处理流程是: 利用拍摄的多对左、右标定图, 利用标定模块对系统进行离线标定,得出立体视觉系统标定参数,以文件形式存储在计算机中。打开左右摄像头, 对获得的左右摄像头实时图进行预处理。对预处理后的左右眼图进行匹配, 由操作员在左眼图中手动框取目标物, 然后由匹配算法在右眼图中进匹配。匹配的结果是目标物中心点像素坐标对。在测距模块中, 利用离线标定得到的立体视觉系统标定参数和匹配模块得到的目标物中心点像素坐标对, 通过深度计算算法即得到了目标物中心点的三维坐标, 系统软件界面如图4所示。
三、 实验结果
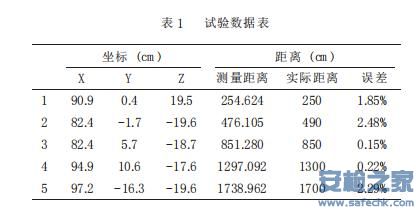
将一目标物置于该排爆机器人双目视觉系统视觉范围之内, 然后启动双目立体视觉系统。利用本双目视觉系统软件, 在软件界面中标示出该目标物,然后计算出该目标物的三维坐标,实验数据如表1所示。实验表明,该系统可以获得较高的定位精度。
四、结论
双目立体视觉直接模拟人类双眼处理景物的方式,可靠简便, 在许多领域均极具应用价值, 一套完整的双目立 体视觉系统可分为以下主要部分: 图像获取、摄像枪定标、特征提取、立体匹配、深度计算。其中, 摄像机标定 与图像匹配是双目立体视觉实现过程中的两个主要步骤。我们提出了一种基于张正友的平面标定方法的排爆机器人视觉系统设计方法,试验数据表明, 该系统能获得良好的定位精度, 提高排爆机器人的性能与易操作性。


推荐产品
 IWILDT™ AN-48002800L物流园大型货车X光安检系统
IWILDT™ AN-48002800L物流园大型货车X光安检系统价格:¥0.00
 IWILDT™ AN-9000CTL静态立体断层扫描X光安检机
IWILDT™ AN-9000CTL静态立体断层扫描X光安检机价格:¥0.00





CopyRight © 2005-2019安检之家安保网 Inc. All Rights Reserved